一、客户需求背景与核心诉求
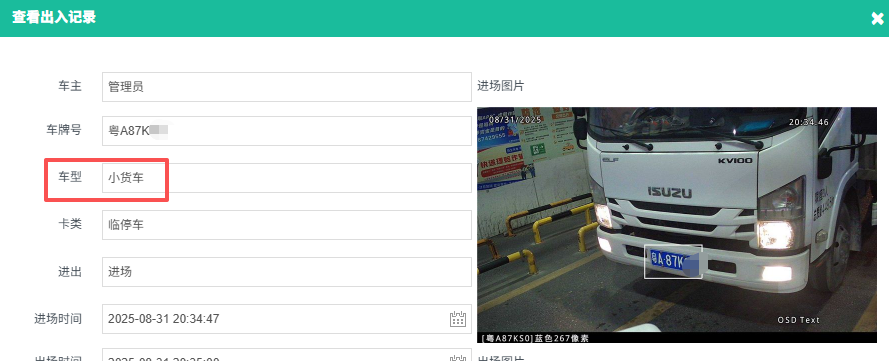
在智慧交通收费场景(如高速公路收费站、园区停车场、物流园区出入口等)中,蓝牌车辆存在 “货车” 与 “小型客车” 两类细分车型,二者因载重、占用道路资源等差异,需执行不同的收费标准。但传统区分方式(如人工目视核对、依赖行驶证信息)存在明显痛点:一是人工核验效率低,易造成车流拥堵;二是主观判断易出错(部分蓝牌货车外观与小车相似),导致收费纠纷;三是无法实现无人化收费场景的自动适配。
基于此,客户明确核心需求:系统需具备全自动区分蓝牌货车与蓝牌小型客车的能力,且区分结果需实时对接计费模块,确保按对应标准精准计费,同时满足高准确率、高实时性、抗复杂环境干扰的使用要求。
二、腾智开发部定制化解决方案:激光雷达车身特征检测方案
针对客户需求,腾智开发部结合激光雷达的 “三维空间感知” 核心优势,摒弃传统视觉识别(易受光照、天气影响)的局限性,设计了以 “车身三维特征提取 + 车型分类算法” 为核心的定制方案,具体实现逻辑如下:
1. 硬件选型与部署:适配场景的激光雷达配置
根据客户实际应用场景(如车道宽度、检测距离、车流速度),定制选用高分辨率激光雷达设备(点云密度≥200 点 /㎡,测距精度 ±3cm,视场角覆盖车道全宽),并通过支架固定于车道正上方或侧方,确保车辆通过时能完整采集车身三维点云数据(含车头、车身、车尾、车轮间距等关键部位)。同时,搭配工业级边缘计算单元,实现点云数据的实时接收与预处理,避免数据传输延迟。
2. 核心技术逻辑:三维特征提取 + 车型分类
Step 1:点云数据预处理
激光雷达采集的原始点云数据会先经过去噪(过滤雨滴、灰尘等干扰点)、地面分割(剔除路面点云,保留车辆点云)、聚类(将单辆车的点云与周围环境分离),确保后续特征提取的准确性。
Step 2:车身关键特征提取
方案重点提取蓝牌货车与小车的差异化三维特征:
蓝牌货车核心特征:车身高度(通常≥1.8m)、轴距(货车轴距普遍长于小车,且存在货箱与驾驶室的 “分段式” 结构,点云呈现明显的 “凹陷” 特征)、轮距(货车后轮多为双胎设计,点云显示为 “双轮轮廓”);
蓝牌小车核心特征:车身高度(通常≤1.6m)、车身轮廓(流线型设计,无明显分段结构)、轴距(短于同长度货车)、轮距(单胎设计,点云轮廓单一)。
Step 3:AI 模型分类与结果输出
基于海量蓝牌货车 / 小车的点云特征样本,训练专属车型分类模型(采用深度学习算法,分类准确率达 99.2% 以上)。模型实时对提取的特征进行匹配判断,若检测到 “分段式车身 + 双轮距 + 轴距 / 高度达标”,则判定为 “蓝牌货车”;若符合 “流线型车身 + 单轮距 + 尺寸达标”,则判定为 “蓝牌小车”。分类结果(含车型标签、置信度)会以标准化接口(如 HTTP/RTSP)实时推送至客户计费系统。
3. 方案核心优势:精准、稳定、适配性强
高准确率:三维点云不受光照(夜间、隧道)、天气(雨天、雾天)影响,车型区分准确率远高于传统视觉方案,误判率低于 0.8%;
高实时性:从点云采集到分类结果输出,全程耗时≤200ms,适配车辆通行速度≤60km/h 的场景,无车流拥堵风险;
强定制性:可根据客户后续新增需求(如区分蓝牌轻卡与微卡、适配不同车道宽度),灵活调整特征提取维度与模型参数,无需更换硬件设备。
三、方案落地价值
该定制方案不仅精准解决客户 “蓝牌车型自动区分 + 差异化计费” 的核心需求,还为客户带来额外价值:
降本增效:替代人工核验,减少人力成本,车道通行效率提升 40% 以上;
减少纠纷:客观三维数据支撑计费依据,避免因人工误判导致的收费争议;
拓展性强:激光雷达采集的车身数据可进一步用于载重估算、车辆违规检测(如超限),为客户后续智慧交通升级提供数据基础。

扫描二维码推送至手机访问。